
Un vehículo autónomo es aquel que se encuentra equipado con tecnología avanzada, la cual le proporciona la capacidad de imitar las habilidades de una persona para conducirlo. Con esto en mente, la industria automotriz está realizando una inversión considerable para tener un vehículo de estas características en un futuro muy cercano. La idea global es que pueda conducirse por sí mismo, sin la necesidad de la intervención de un conductor humano. Sin embargo, surgen varias preguntas con respecto a este tipo de vehículos ¿Cómo «ven» a su alrededor? ¿Cómo «piensan» y toman decisiones? ¿Cómo «hablan» con los peatones? A continuación, contestaré de forma general estas preguntas.
¿Cómo «ven» los vehículos autónomos?
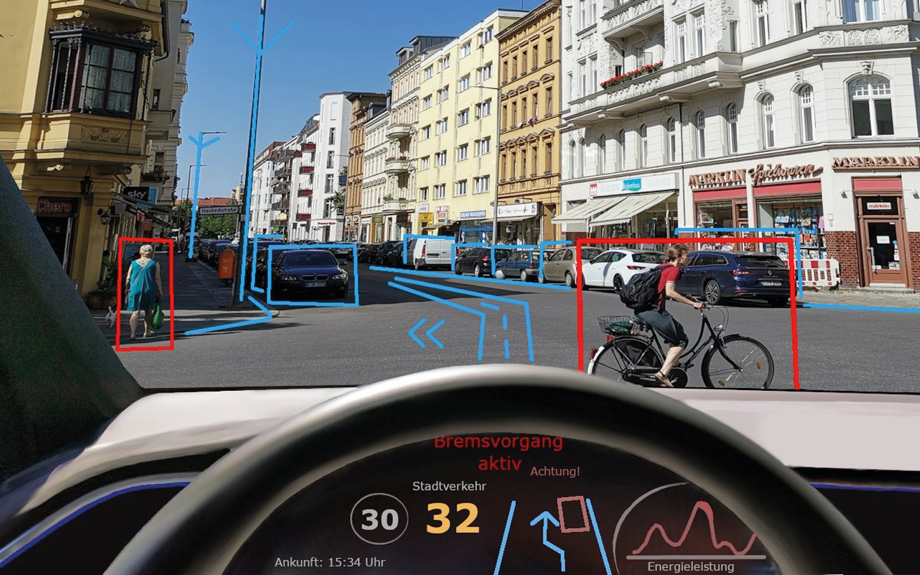
Los vehículos autónomos tienen que percibir qué es lo que pasa a su alrededor para poder tomar decisiones de conducción tales como frenar, acelerar, dar vuelta, entre otras acciones. Al proceso de «ver el mundo que lo rodea» e interpretar la información que recibe se le denomina percepción, función que tienen los vehículos autónomos para identificar todos los objetos que están a su alrededor, como su forma, velocidad, desplazamiento y dirección. La percepción les permite detectar, identificar y clasificar todos los objetos y sus características, así como analizar las condiciones de las superficies por donde se desplaza.
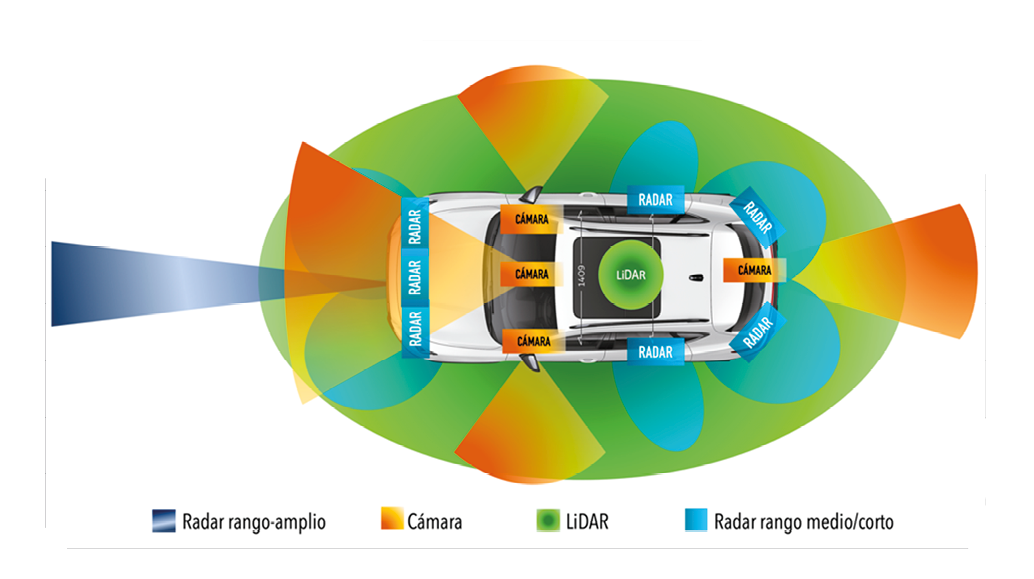
Para recolectar la información del entorno, el vehículo autónomo está equipado con sensores instalados tanto en el interior como en el exterior del coche, los cuales trabajan de forma integrada para incrementar la exactitud o precisión de la detección e identificación de objetos. A esa integración se le conoce como fusión de datos.
La fusión de datos utiliza métodos de inteligencia artificial para identificar patrones, planeación, deducción y aprendizaje. Si algún sensor falla o por las limitaciones de este proporciona información incorrecta, el vehículo puede comparar con los datos recolectados por otros sensores y complementarla o, en su caso, realizar los cálculos sin tomar en cuenta la información proporcionada por el sensor erróneo.
¿Cómo «piensan» los vehículos autónomos?
El sistema de control es el cerebro del vehículo autónomo, el cual le permite analizar la situación y tomar decisiones de las acciones a seguir. La inteligencia artificial tiene un papel preponderante en el proceso de «pensar» del vehículo, ya que integra varias disciplinas como el tratamiento de grandes cantidades de datos (Big Data), el aprendizaje automático (Machine Learning) y el aprendizaje profundo (Deep Learning). Toda la información recolectada por los sensores se utiliza por estas disciplinas para que el vehículo pueda predecir lo que podría ocurrir y de esta manera pueda tomar decisiones sobre las acciones a ejecutar. Además, el vehículo autónomo tiene la capacidad de ir aprendiendo de las diferentes situaciones a las que se va enfrentando con base en la información que recibe de los diferentes sensores.
¿Cómo «hablan» los vehículos autónomos?
Una de las preguntas que surgen con los vehículos autónomos es ¿Cómo interactuarán con los peatones? ¿Cómo puede saber un peatón si es seguro transitar por las calles? Generalmente, existe una interacción informal entre el conductor y el peatón que se realiza mediante contacto visual, expresiones o señales con las manos. Esta interacción influye directamente en el comportamiento y reacción del peatón, ya que le da ese nivel de seguridad para realizar la tarea de cruzar la calle. Si los vehículos autónomos tendrán capacidad para conducirse sin la ayuda de un humano, entonces ¿Cómo sabré si puedo cruzar de forma segura? ¿Cómo sabré si detectó que quiero cruzar la calle?
Está claro que los coches autónomos ocasionarán una evolución social en los peatones por la falta de comunicación informal explícita, lo cual podría ocasionar en ellos inseguridad y que lleguen a pensar que están poniendo en riesgo su vida. Se sabe que el coche autónomo usará sensores y algoritmos sofisticados para detectar, identificar y predecir la intención de los peatones; sin embargo, aún se tiene la incertidumbre de cómo se comunicará directamente con los peatones para expresar sus acciones a realizar. Aquí surgen dos preguntas: ¿Qué información tiene que comunicar? Y ¿Cómo la tiene que comunicar?
¿Qué información comunicar?
Esta pregunta es muy difícil de contestar. Hasta el momento, las investigaciones se han enfocado en tres áreas: modo de conducción, intención de conducción y percepción. A continuación, veamos cada uno de ellas:

Modo de conducción
Sabemos que para que los coches sean completamente autónomos pasarán muchos años, mientras tanto, tendremos una conducción híbrida donde un humano y la computadora compartirán la tarea. Es esencial que quien tiene el control del vehículo (el humano o la computadora) se comunique con los peatones, ya que esto les proporcionará un mejor nivel de confianza y seguridad.
Intención de conducción
Es esencial para que los peatones y el resto de los usuarios sepan cuáles son las acciones a seguir por el coche (saber si detectó al peatón y si se detendrá o no). El principal problema es ¿Qué tanta información necesita comunicar el vehículo?, por ejemplo, ¿debe de ser muy explícito para indicarle al peatón que le está cediendo el paso o simplemente necesita comunicar que ha detectado al peatón? Se considera que no es necesario que comunique explícitamente las instrucciones a los usuarios de la vía pública, ya que para una situación existen muchas acciones que se pueden llevar a cabo y eso varía de peatón a peatón.
Percepción
Tiene que ver con la capacidad del vehículo para detectar las situaciones a su alrededor, pero no por eso tiene que comunicarla. En este sentido, ¿cuál sería el beneficio real de que notifique que detectó peatones o ciclistas? Podríamos decir que puede ser agradable, pero no es un proceso esencial en todos los casos para una interacción segura.
¿Cómo la tiene que comunicar?
Con esto en mente, en los últimos años se están realizando esfuerzos para solventar el problema de interacción natural entre el coche autónomo y el peatón. Las propuestas que se están desarrollando se enfocan en el diseño de interfaces visuales, esto con el fin de conservar la forma en cómo se ha realizado la comunicación durante todo este tiempo. A su vez, se están realizando interfaces auditivas para integrarlas a la interfaz visual y, de esta forma, ampliar la comunicación a peatones que sufran algún impedimento visual. A continuación, se describen algunos de los prototipos de interfaces de comunicación que se están proponiendo para crear una mejor interacción entre peatones y coches autónomos.
Uso de pantallas
Permite la interacción con el peatón a través del uso de textos y las intenciones de conducción. Los mensajes de texto desplegados pueden ser simples («alto», «cruzar») o mensajes compuestos («esperando que cruces»). Además, puede desplegar íconos que representen gestos o expresiones más amigables para el peatón. De esta forma, el vehículo autónomo puede mostrar un gesto en la pantalla para indicarle al peatón que ya fue detectado y que hará un alto total para cederle el paso y que pueda cruzar de forma segura.
Uso de cintas de luces leds.
Pueden ubicarse en el frente del parabrisas o en la parrilla del vehículo; el modo de comunicación puede hacer uso del parpadeo de luces para iniciar el modo de comunicación con el peatón. Otra forma de comunicación está relacionada con el color de las luces y para ello los estudios se están enfocando en la definición de los colores más adecuados. En ese sentido, existen muchas limitaciones ya que, por ejemplo, en algunos países los colores como rojo, azul o naranja son reservados para vehículos de emergencia. Los pocos estudios que se han hecho han llegado a la conclusión de que el color turquesa o cian son los que producen menos confusión.
Proyecciones u hologramas
Esta propuesta de interfaz despliega información relevante (mediante texto o imágenes) sobre el piso por medio de láser. De esta manera, si el vehículo detecta que un peatón está esperando para cruzar la calle, el coche podría proyectar una imagen que represente un paso de cebra y una persona cruzando. Al igual que las interfaces de pantallas, tiene limitaciones para incluir a grupos de personas vulnerables como lo son niños o personas con discapacidad visual.
Emulación del contacto visual con los peatones
La interfaz despliega el «movimiento de ojos» e intenta reemplazar la falta de contacto visual entre el conductor y el peatón. El vehículo autónomo identifica la ubicación del peatón y de esta forma se dirige la «mirada», simulada por la interfaz, hacia ese lugar. Esta interfaz podría ser más intuitiva para el peatón que el despliegue de información más abstracta.
Aunque se está trabajando en el desarrollo de los vehículos autónomos, esto solo es el inicio, pues todavía queda mucho por investigar para generar sistemas que sean seguros y amigables con las personas.
Para Saber Más:
Darlington K. (2020). Automóviles completamente autónomos. ¿Cómo y cuándo serán una realidad? OpenMind BBVA. https://www.bbvaopenmind.com/tecnologia/innovacion/automoviles-completamente-autonomos-como-y-cuando-realidad/
Matus D. (2017). ¿Sabes realmente cómo «ven» los carros autónomos? DigitalTrends ES. https://es.digitaltrends.com/autos/experimento-como-ven-carros-autonomos/
Rodella F. (2019). ¿Cómo piensa un coche autónomo? Tungsteno. https://www.sacyr.com/-/-como-piensa-un-coche-autonomo-
Juan Antonio Guerrero Ibáñez. Maestro en Tecnologías de Internet, Facultad de Telemática, Universidad de Colima, Colima, México.
Esta dirección de correo electrónico está siendo protegida contra los robots de spam. Necesita tener JavaScript habilitado para poder verlo.